+




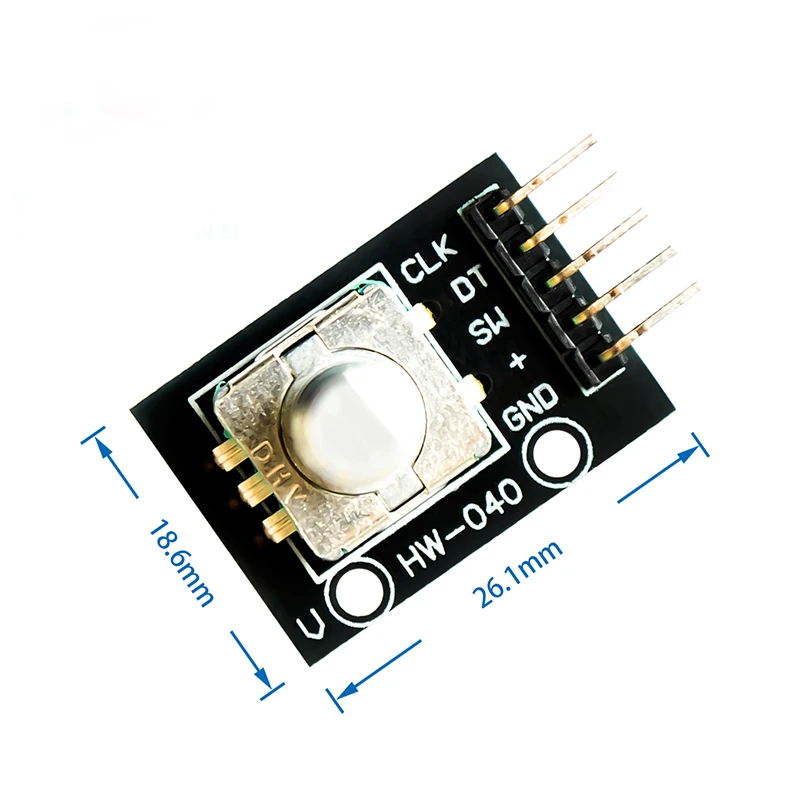
KY-040 360 graus módulo de interruptor codificador rotativo, tijolo sensor interruptor desenvolvimento ky040 potenciômetro knob kit para arduino
Material: componentes eletrônicos + pcb Tamanho: cerca de 31*19*29mm / 1.22 "* 0.75" * 1.14" Cor principal: Preto Tensão de funcionamento: 5v

 Os codificadores giratórios podem contar o número de pulsos de saída durante a rotação dianteira e reversa através da rotação. Ao contrário de um potenciômetro, a contagem de rotação não é limitada. Com os botões no codificador rotativo, pode ser redefinido ao estado inicial, isto é, contando de 0.
Princípio de funcionamento:
O codificador incremental é um sensor giratório que converta o deslocamento rotatório em uma série de sinais de pulso digitais. Estes pulsos são usados para controlar o deslocamento angular. A conversão angular do deslocamento no codificador de eltra usa o princípio fotoelétrico da exploração. O sistema de leitura baseia-se na rotação de um disco de índice radial (disco de código) composto por janelas de transmissão de luz alternada e janelas opacas, e é iluminado verticalmente por uma fonte de luz infravermelha ao mesmo tempo, e a luz projeta a imagem do disco de código na superfície do receptor. O receptor é coberto com uma camada de grade de difração, que tem a mesma largura da janela que o disco de código. O trabalho do receptor é detectar as mudanças produzidas pela rotação do disco e, em seguida, converter as mudanças de luz em alterações elétricas correspondentes. Em seguida, faça o sinal de baixo nível subir para um nível mais alto, e produzir um pulso quadrado sem qualquer interferência, que deve ser processado por circuitos eletrônicos. O sistema de leitura geralmente usa um método diferencial, isto é, dois sinais diferentes com a mesma forma de onda mas uma diferença de fase de 180 ° são comparados a fim melhorar a qualidade e a estabilidade do sinal de saída. A leitura é formada com base na diferença entre os dois sinais, eliminando assim a interferência.
Incremental encoder:
Os codificadores incrementais dão ondas quadradas bifásicas, sua diferença de fase é 90 °, geralmente chamado de canal e canal b. Um dos canais fornece informações relacionadas à velocidade de rotação. Ao mesmo tempo, os dois sinais de canal são comparados sequencialmente para obter a informação da direção de rotação. Há também um sinal especial chamado canal z ou zero, que dá a posição zero absoluta do codificador. Este sinal é uma onda quadrada que coincide com a linha central da onda quadrada de um canal.
Os codificadores giratórios podem contar o número de pulsos de saída durante a rotação dianteira e reversa através da rotação. Ao contrário de um potenciômetro, a contagem de rotação não é limitada. Com os botões no codificador rotativo, pode ser redefinido ao estado inicial, isto é, contando de 0.
Princípio de funcionamento:
O codificador incremental é um sensor giratório que converta o deslocamento rotatório em uma série de sinais de pulso digitais. Estes pulsos são usados para controlar o deslocamento angular. A conversão angular do deslocamento no codificador de eltra usa o princípio fotoelétrico da exploração. O sistema de leitura baseia-se na rotação de um disco de índice radial (disco de código) composto por janelas de transmissão de luz alternada e janelas opacas, e é iluminado verticalmente por uma fonte de luz infravermelha ao mesmo tempo, e a luz projeta a imagem do disco de código na superfície do receptor. O receptor é coberto com uma camada de grade de difração, que tem a mesma largura da janela que o disco de código. O trabalho do receptor é detectar as mudanças produzidas pela rotação do disco e, em seguida, converter as mudanças de luz em alterações elétricas correspondentes. Em seguida, faça o sinal de baixo nível subir para um nível mais alto, e produzir um pulso quadrado sem qualquer interferência, que deve ser processado por circuitos eletrônicos. O sistema de leitura geralmente usa um método diferencial, isto é, dois sinais diferentes com a mesma forma de onda mas uma diferença de fase de 180 ° são comparados a fim melhorar a qualidade e a estabilidade do sinal de saída. A leitura é formada com base na diferença entre os dois sinais, eliminando assim a interferência.
Incremental encoder:
Os codificadores incrementais dão ondas quadradas bifásicas, sua diferença de fase é 90 °, geralmente chamado de canal e canal b. Um dos canais fornece informações relacionadas à velocidade de rotação. Ao mesmo tempo, os dois sinais de canal são comparados sequencialmente para obter a informação da direção de rotação. Há também um sinal especial chamado canal z ou zero, que dá a posição zero absoluta do codificador. Este sinal é uma onda quadrada que coincide com a linha central da onda quadrada de um canal.  A precisão dos codificadores incrementais depende de fatores mecânicos e elétricos. Estes fatores são: erro de indexação de grade, excentricidade de disco, excentricidade de rolamento, erros introduzidos pelo dispositivo de leitura eletrônica e a inexatidão da parte óptica. A unidade de medição para determinar a precisão do codificador é o grau elétrico, e a precisão do codificador determina a divisão de pulso do codificador. Os seguintes usos 360 ° graus elétricos para representar a rotação do eixo mecânico, e a rotação do eixo deve ser um ciclo completo. Para saber quanto ângulo mecânico é equivalente a elétrico 360 graus, você pode usar a seguinte fórmula para calcular: elétrico 360 = mecânico 360 °/n ° pulso/
A precisão dos codificadores incrementais depende de fatores mecânicos e elétricos. Estes fatores são: erro de indexação de grade, excentricidade de disco, excentricidade de rolamento, erros introduzidos pelo dispositivo de leitura eletrônica e a inexatidão da parte óptica. A unidade de medição para determinar a precisão do codificador é o grau elétrico, e a precisão do codificador determina a divisão de pulso do codificador. Os seguintes usos 360 ° graus elétricos para representar a rotação do eixo mecânico, e a rotação do eixo deve ser um ciclo completo. Para saber quanto ângulo mecânico é equivalente a elétrico 360 graus, você pode usar a seguinte fórmula para calcular: elétrico 360 = mecânico 360 °/n ° pulso/
 Vire para a imagem: a e b invertendo o sinal
O erro de indexação do codificador é expresso pelo desvio máximo de duas ondas de pulso contínuas em ângulos elétricos. Os erros existem em qualquer codificador, que é causado pelos fatores acima mencionados. O erro máximo do codificador eltra é ± 25 graus elétricos (em quaisquer condições que tenham sido declaradas), o que é equivalente a um desvio de valor nominal de ± 7%. Quanto à diferença de fase de 90 ° (eletricamente), o desvio máximo dos dois canais é de 35 35 o grau elétrico é equivalente a cerca de deviation 10% desvio do valor nominal.
Sinal UVW encoder incremental
Além dos codificadores tradicionais acima mencionados, há alguns codificadores incrementais integrados com outros sinais de saída elétrica. O codificador incremental integrado com o sinal uvw é um exemplo, e é usado geralmente no feedback dos servos motores da c.a.. Estes sinais magnéticos do pólo aparecem geralmente em servo motores da c.a., e os sinais de uvw são projetados geralmente simulando a função de componentes magnéticos. No codificador eltra, esses sinais uvw são gerados opticamente e aparecem na forma de três ondas quadradas, que são compensadas por 120 ° uns dos outros. A fim de ligar o motor, o acionador de partida usado para controlar o motor precisa destes sinais corretos. Estes pulsos de pólo magnético uvw podem ser repetidos muitas vezes na rotação do eixo mecânico porque dependem diretamente do número de pólos do motor conectado e são usados para sinais uvw de 4, 6 ou mais motores de pólo.
Vire para a imagem: a e b invertendo o sinal
O erro de indexação do codificador é expresso pelo desvio máximo de duas ondas de pulso contínuas em ângulos elétricos. Os erros existem em qualquer codificador, que é causado pelos fatores acima mencionados. O erro máximo do codificador eltra é ± 25 graus elétricos (em quaisquer condições que tenham sido declaradas), o que é equivalente a um desvio de valor nominal de ± 7%. Quanto à diferença de fase de 90 ° (eletricamente), o desvio máximo dos dois canais é de 35 35 o grau elétrico é equivalente a cerca de deviation 10% desvio do valor nominal.
Sinal UVW encoder incremental
Além dos codificadores tradicionais acima mencionados, há alguns codificadores incrementais integrados com outros sinais de saída elétrica. O codificador incremental integrado com o sinal uvw é um exemplo, e é usado geralmente no feedback dos servos motores da c.a.. Estes sinais magnéticos do pólo aparecem geralmente em servo motores da c.a., e os sinais de uvw são projetados geralmente simulando a função de componentes magnéticos. No codificador eltra, esses sinais uvw são gerados opticamente e aparecem na forma de três ondas quadradas, que são compensadas por 120 ° uns dos outros. A fim de ligar o motor, o acionador de partida usado para controlar o motor precisa destes sinais corretos. Estes pulsos de pólo magnético uvw podem ser repetidos muitas vezes na rotação do eixo mecânico porque dependem diretamente do número de pólos do motor conectado e são usados para sinais uvw de 4, 6 ou mais motores de pólo.
Pacote : SMD
Temperatura de Operação : standard
Potência de dissipação : standard
Número do modelo : KY-040 360 Degrees Rotary Encoder Module
Tensão de alimentação : 5V
Origem : CN (Origem)
Aplicação : COMPUTADOR
Tipo : REGULADOR DE TENSÃO
Condição : novo
Cutomizado : Sim
4 : KY-040 for arduino
1 : KY-040 Encoder Module
3 : Encoder knob
2 : 360 Degrees Rotary Encoder Module
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}